Call in the Birds! Collecting Meteorological Data using Avian Bioplatforms
- By AMS Staff
- Apr 21, 2021

We are in desperate need of better meteorological data around cities. The lack of sufficient, fine scale observations for the urban boundary layer (UBL) region above and close to building height makes it difficult to improve meteorology and numerical weather prediction models for cities. Better data would have impacts for public health, localized flooding, and urban planning. And though much progress has been made in identifying and solving this problem, a number of challenges remain.
The technology now used for measurements in and around cities includes surface and roof-mounted Doppler lidar to study urban wind profiles. Temperature profiles can be measured by acoustic profiling instruments (such as this example at UCAR), but their use in cities is limited because they make a great deal of noise when used. It’s also challenging to deploy ground-based instrumentation in multiple locations because of both cost and size.
Both tethered balloons and unmanned aerial vehicles (UAV) offer ways to deploy meteorological and chemical instruments at the right scale for gathering relevant data. But there are complex safety requirements for flying them out of the line of sight in populated areas. This means that they are used most frequently in remote settings and are heavily regulated in urban areas.
Despite these difficulties, it is clear that these measurements of temperature, turbulence, and humidity are needed to forecast the complex atmosphere above cities. If we’re able to improve understanding and prediction for the urban boundary layer, this will mean better urban weather prediction, increased public health support through more accurate event forecasting (e.g., heat waves, climatic conditions during sporting events, weather impacts during releases of hazardous substances), more sophisticated air pollution modeling, and critical inputs for sustainable urban planning for high-density “livable” cities.
So how do we get better measurements? What if we could find something that already lives in cities and gathers an incredible amount of data on atmospheric conditions everyday?
There is a growing body of work which uses animal tagging and tracking to expand observational data in places where humans cannot or do not travel. This is called biologging: some type of tag or device is placed in or on animals to track their movements and learn more about their behavior and physiology while also capturing data about the environment in which they move. This type of work began in the mid-1960s when scientists attached devices to diving Weddell seals (Leptonychotes wedelii). It has expanded to be used for brown bear conservation and studies of wolverine physiology to name only a few. But one of the most exciting prospects for meteorologists and all weather nerds, is the possibility of using birds to collect weather data.
As sensors have gotten smaller and more sophisticated, technology is at the point where it can safely be attached to unmanned avian units. Researchers have already been experimenting with attaching small scale GPS units to birds to gather meteorological data. These GPS units can be used not only to geolocate individuals, but also to estimate wind velocity and convective velocity scale to generate high-resolution weather observations. One project in Southern California used pigeons to gather data on environmental pollution and examine the potential for citizen science reporting. Others have looked at how birds in the south of France can collect data for storm prediction.
The in depth case study featured here took place in Europe and tested the functionality of a miniature sensor package on White Tailed Eagles and Spanish Imperial Eagles. The goal of the project was to examine alternatives to drones and balloon data capture for gathering meteorological data around cities.
The Case Study: Avian Sensor Packages for Meteorological Measurements
During this experiment, four flight tests were conducted in a steep valley (glen) at a remote Scottish location that provided contrasting vertical temperature profiles. The glen was instrumented with additional meteorological equipment at the bird launch and landing sites. Vertical temperature profile data from the raptors indicated the success of this approach with absolute temperatures and lapse rates consistent with those measured by the weather stations. Movement and airspeed data aided the interpretation of finescale temperature profiles in the complex terrain. As well as the potential for meteorological sensing, this work is of interest to the avian ecology and behavior communities and to aerodynamicists interested in developing airborne robotics to mimic aspects of bird flight.
The assessment included (i) comparisons between eagle- and ground-based measurements of temperature, wind speed, and wind direction; (ii) mounting biases of the sensor and its radiation shield caused by the proximity of the sensor to the avian body; and (iii) influences on measured parameters of bird orientation relative to ground, sun, and wind direction. Additionally the measurements provided insights into microclimates in the glen, and information regarding the strategic and dynamic flight planning of these raptorial birds.
During the flight tests, a white-tailed eagle (WTE) and a Spanish imperial eagle (SIE) carried a package containing a wind speed sensor, a GPS, a pressure altimeter, and accelerometers. The eagles were captive birds belonging to Freedom Conservation, a Swiss organization aiming to enhance the reintroduction of the species across Europe. The birds are trained to carry small lightweight cameras and have done so for many flights with Freedom Conservation. The lowered head position during flight provides a back-mounted camera with an unobstructed view.
In order to create a meteorologically complex area that would still be safe enough to perform flight tests with equipment, the site chosen was fairly deserted. Bealach na Bà is situated in a steep-sided glaciated hanging valley and has the greatest ascent rate of any road in the United Kingdom.
The materials placed on the birds were called the Eagle Sensor Package (ESP). The ESP was designed to be light weight and manageable for flight, and was made of off-the-shelf components to measure humidity, wind speed, GPS location, pressure altitude, and movement. Also present was a beta version of an Imet-XQ (International Meteorology Systems, United States) sensor. There was also a Raspberry Pi Zero microcontroller that ran Python logging code at a rate of 2 Hz following activation via a PC connection prior to mounting on the bird. Battery life was approximately 6 hours long.
Sensors were housed in a 3D-printed box (ESS Systems, United Kingdom) with overall dimensions of 70 mm × 49 mm × 38 mm. The box contained compartments for the ESP components, and holes for the other elements: a pitot tube (a small plastic tube that measures air flow speed), back, and tail sensor wires. All together, this was a prototype package created to test the efficacy of the approach and the sensors. The package is currently undergoing further miniaturization.
To test the data collected by the ESP, supplementary weather data was supplied by two WXT weather stations made by Vaisala in Finland. They measured temperature, humidity, pressure, wind speed, and wind direction in 60 second intervals. A Skye Instruments pyranometer was also used along with a Gilly Instruments sonic anemometer that recorded at 20 Hz on a laptop. There was a Met Office Integrated Data Archive System surface station close to the launch location that also provided meteorological information.
On the day of launch, the ESP was mounted on the birds by Freedom Conservation using their veterinarian-approved attachment method. This proprietary technique enables them to mount high-quality video cameras stably to capture commercially viable footage. It was anticipated that the tail-mounted sensor, being distal from the thermogenic central core of the bird’s body, would be less prone to detection of heat generated by the flying bird. To investigate this, a temperature sensor (additional to the back-mounted one) was mounted on the tail of the SIE using a mount clip and connected to the ESP with a 3-mm wire. It was deployed carefully to allow sufficient movement for flight, and the connecting wire was short enough to prevent entanglement.
In order to measure air flow speed, the pitot tube was oriented forward to measure wind over the back of the bird when flying in a horizontal, head-down position. The logger was attached and activated at a car park area near the launch site. The bird was then driven to the launch point and released within 15 minutes. The birds did not seem to take any notice of the sensors and showed no abnormal behavior or reluctance to take off.

Figure 1: Payload mounted on the back of the SIE immediately prior to Flight 6A, showing the forward-facing pitot tube and FTBack (in shield), and wire leading to FTTail (highlighted by the oval). FTTail was carefully fitted to allow sufficient room for flight movements, while the wire was short enough to prevent entanglement. (inset) A close-up is shown of the mounted ESP and data probes.
Citation: Bulletin of the American Meteorological Society 99, 3; 10.1175/BAMS-D-16-0181.1
The weather between 6 and 8 May 2016 was typical for the time of year in northwest Scotland—temperatures of 37°– 48°F, relative humidity of >60%, 1-min mean wind speeds of 0–31 mph, and overcast. Rainfall events occurred on the night of 5 May and overnight on 7–8 May. The weather and time of day of these four flights provided near-neutral stratification conditions for the altitudes where the birds were flying.
Four flights were conducted between 6 and 8 of May. Two were flown with the Skye Instruments package on the Spanish Imperial Eagle in the late afternoon of 6 May 2016 (Flight 6A and Flight 6B) and two with the White Tailed Eagle on the morning of 8 May 2016 (Flight 8A and Flight 8B), as shown in Figs. 2a and 2b, respectively. With respect to bird release and recapture, all flights went according to plan—upon release the birds broadly followed the line of the glen southeast to the handler. During the flights, the body heat of the birds and the effect of sunlight were noted, indicating that sensors were not shielded quite enough.
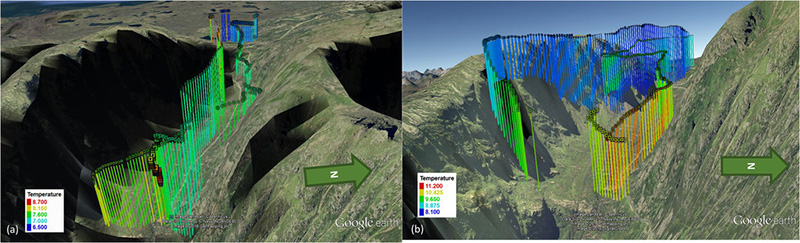
Figure 2: GPS traces of (a) Flight 6A (squares) and Flight 6B (circles) on 6 May 2016 and (b) Flight 8A (squares) and Flight 8B (circles) on 8 May 2016. Colors represent temperature, and size of marker represents ground speed. To avoid terrain, all traces have been moved vertically upward by 100 m, and Flight 6B, being particularly close to the cliff, has been moved south by 111 m (0.001° latitude). Shadows are Google Earth’s representation of the conditions on 6 May and 8 May.
Citation: Bulletin of the American Meteorological Society 99, 3; 10.1175/BAMS-D-16-0181.1
Performance of the Eagle Sensor Package
For each of the flights, ESP “flight envelopes” were constructed under the dynamic meteorological conditions encountered in this Scottish glen. The ESP performed well for temperature soundings as long as the sensor and its radiation shield had wind between 22-44 mph flowing over them. Unfortunately, the beta version of a commercial small humidity sensor failed to collect data during the flights. Future ESP designs will incorporate a fast-response humidity sensor.
The pitot tube improved interpretation of the temperature data through direct measurement of wind flow over the birds’ backs and indicated that measurement of ambient wind is possible and will improve with data points from longer flights, providing data in all wind directions and by adding integrated magnetometer data for improved bird orientation. With longer flights, the data can also be coupled with GPS traces to measure ambient wind speed and direction accurately (e.g., Treep et al. 2016). Further miniaturization of the pitot tube is being assessed.
For microclimate investigation when in proximity to vertical solid surfaces, such as cliff faces, positional and accelerometer data assist with interpretation; these microclimates contrast markedly with those from clear profiles, such as in the middle of the glen.
In contrast to our initial expectations, tail mounting of temperature sensors was not found to be ideal. Sensor performance can be disrupted by unquantifiable shielding from tail feathers that are susceptible to inputs, such as dirt and moisture, that will further disrupt sensor functionality. Moreover, as birds use tail feathers in flight for maneuvering (Thomas 1993), the sensors are subjected to considerable disturbance.
Birds of prey, such as eagles, are not long-distance flyers but employ thermals during soaring flights. Their large wings allow reduced investment of energy per unit time, through slow flights and consequently low wing loading. From the few studies done, it appears that wind direction, wind speed, and air temperature may be key determinants of eagle flight characteristics. When freely living, birds may not choose or they may be unable to fly in certain meteorological conditions (e.g., low winds, high wind shear). Understanding more about the flight strategies of these avian “platforms'' for the sensors will allow their flight capabilities to be harnessed to best investigate the meteorological feature(s) of interest. Shepard et al. (2016) have begun this process through studying airflow in urban areas by remotely observing gull interactions with airflow around buildings. Although the present study used raptorial species at a remote (nonurban) location, it is reasonable to propose that raptors carrying our sensors be used for meteorological work in urban centers. After all, raptors are increasingly observed in our towns and cities, and their abundance and movements within cityscapes are predicted to rise (Bird et al. 1996). Pigeons are also a possible species for carrying a smaller version of the ESP payload and we are investigating this approach.
When transferring this technique to other situations, there are some operational limitations to consider. The 5% payload limit has been discussed above and is a matter of increasing technological development and miniaturization. An issue inherent to all animal-based measurement techniques is a lack of control over the exact location where data are collected. With raptor and homing pigeon flights, the release and recapture positions are defined, but the route between the two positions is not set. This lends itself to research applications where the vertical profile of a horizontally homogeneous atmosphere is of interest. In a heterogeneous atmosphere (e.g., city landscape and urban boundary layer), a cluster approach using a flock of birds may yield a more useful dataset, although, again, individual flight paths are not defined. For comparison, UAV use also requires licensing and while it is possible to decide on the exact flight path with a UAV, it is not easy to fly them over long distances across urban airspace or at night for the investigation of nocturnal boundary layers.
Conclusions and Future Work
This project made robust temperature sensor profiles using accurate fast-response sensors mounted on the backs of two captive eagles. In addition, our sensor package contained a pitot tube and demonstrated the potential for the derivation of wind speed and direction.
Our next steps are to continue to reduce the payload weight and to work toward flights in urban areas, for use on other species. We have produced a payload version that weighs under an ounce for temperature and have performed tests with improved radiation shields and new wind sensor designs. A magnetometer has been added to determine bird orientation and to improve wind vector calculations. We are also working to understand the accuracy of the temperature measurements by pseudosimulating flight conditions using heating pads on decoy birds mounted on a vehicle. Thermal IR imagery from this study qualitatively informs the experimental design. We think, with similar continued calibration and testing, our use of avian bioplatforms has the potential to fill a measurement niche for research applications in, and beyond, the urban area.
This case study has been edited and abridged specifically for the AMS Weather Band from the article "Avian Sensor Packages for Meteorological Measurements" by Rick M. Thomas, A. Rob MacKenzie , S. James Reynolds, Jonathan P. Sadler, Ford Cropley, Simon Bell, Stephen J. Dugdale, Lee Chapman, Andrew Quinn, and Xiaoming Cai. Any errors or omissions may be attributed to AMS staff. Copyright remains with the AMS.